



















CrowBot BOLT-Open Source Programmable Smart Robot Car STEAM Robot Kit
CrowBot BOLT is an open source smart programming car powered by an ESP32 chip. It comes with Wifi and Bluetooth functions, and can meet a variety of programming environments like Letscode, Micropython, and Arduino. Unlimited creativity, waiting for you to discover!
Description
CrowBot BOLT is an open source smart programming robot car powered by an ESP32 chip. It has a wealth of sensors(such as a light sensor, ultrasonic sensor, and line Tracking Sensor), comes with Wifi and Bluetooth-compatible functions, and can meet a variety of programming environments like Letscode, Micropython, and Arduino. This programming robot kit can quickly realize functions such as light tracking, line tracking, obstacle avoidance, remote control, and light show. As an entry-level STEAM educational robot car toy, the cool and cute BOLT makes robot programming learning and teaching easy and fun. It comes with 16 lessons in three languages (Letscode, Arduino, MicroPython), provides rich graphical programming, and allows programming beginners to learn to program in the fun of creativity. It has reserved 2 expansion interfaces, which can be expanded and used with 150+ kinds of Crowtail modules. Unlimited creativity, waiting for you to discover!
This is an open source robot car, all design files can be downloaded below.


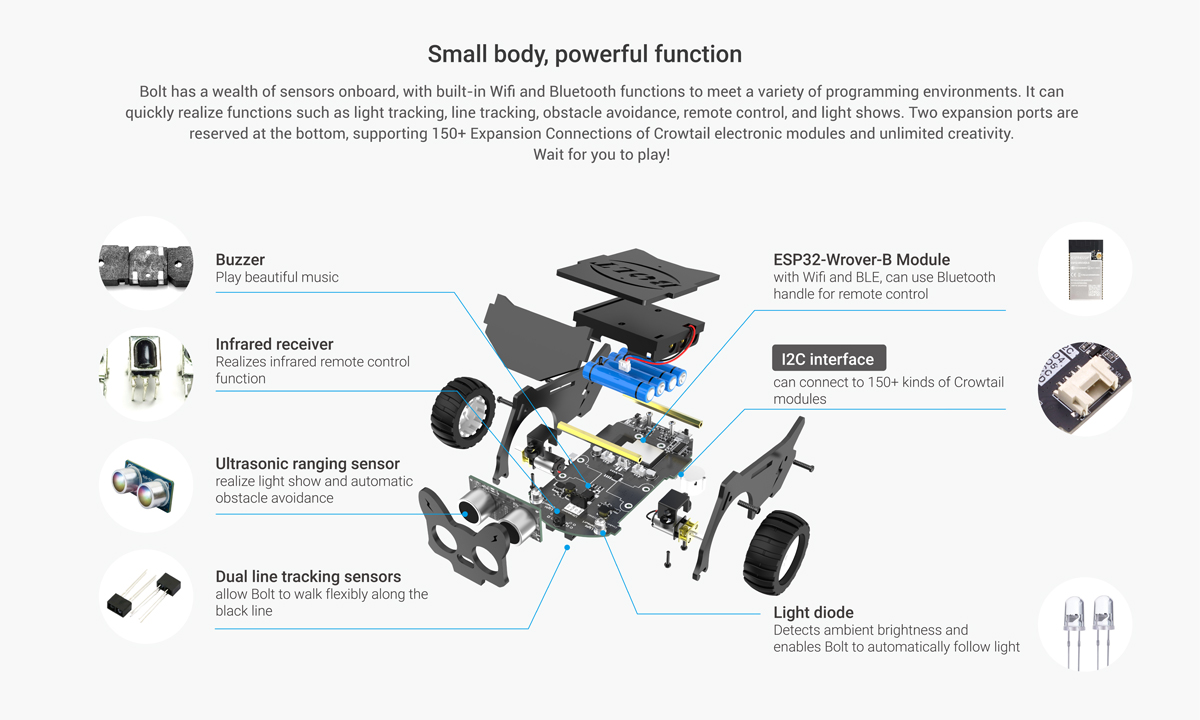
- CrowBot's ultrasonic sensors can not only automatically avoid obstacles, but also emit colorful RGB lights. The unique design gives it more creative possibilities.
- CrowBot uses acrylic plate as the shell, and the assembly is simple, just align the positioning holes or slots, and tighten the screws to complete.

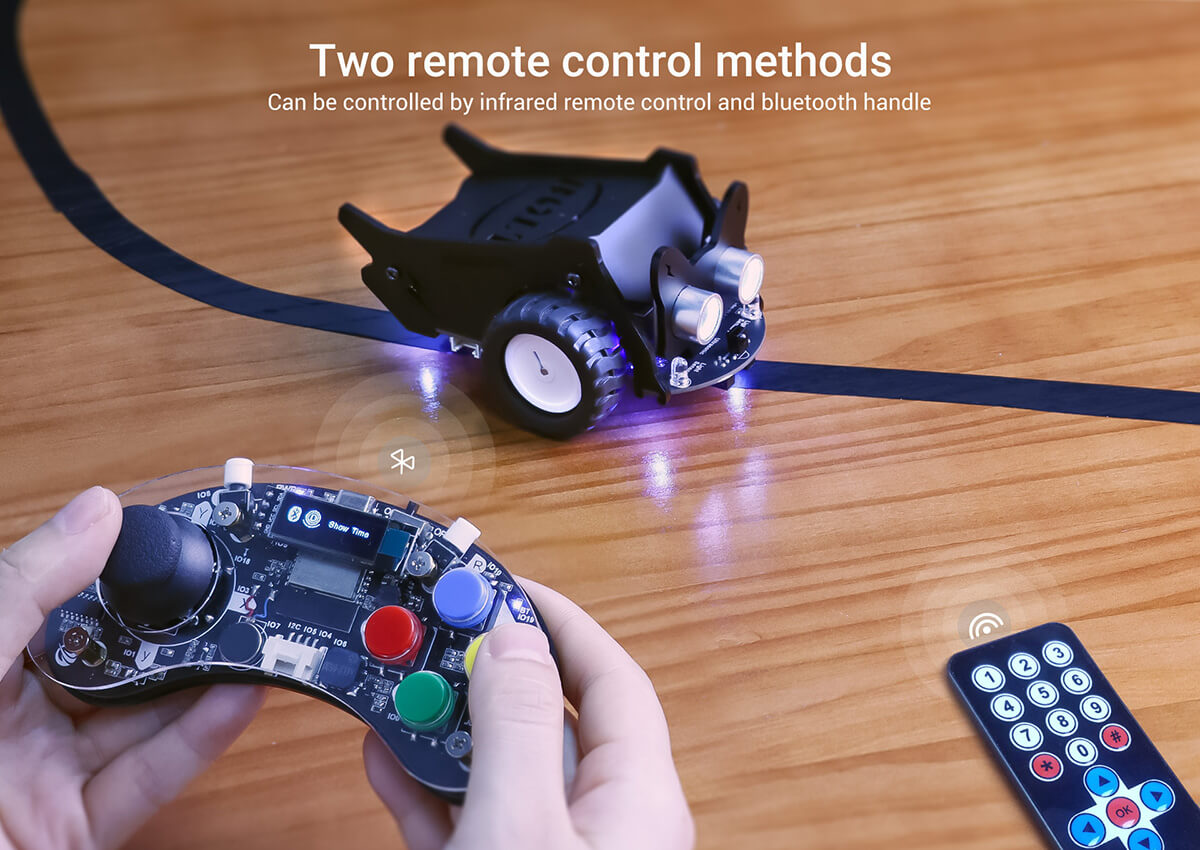
- It can use an infrared remote or a Bluetooth-compatible joystick to control. These two methods have flexible control and can change direction at any time.

|
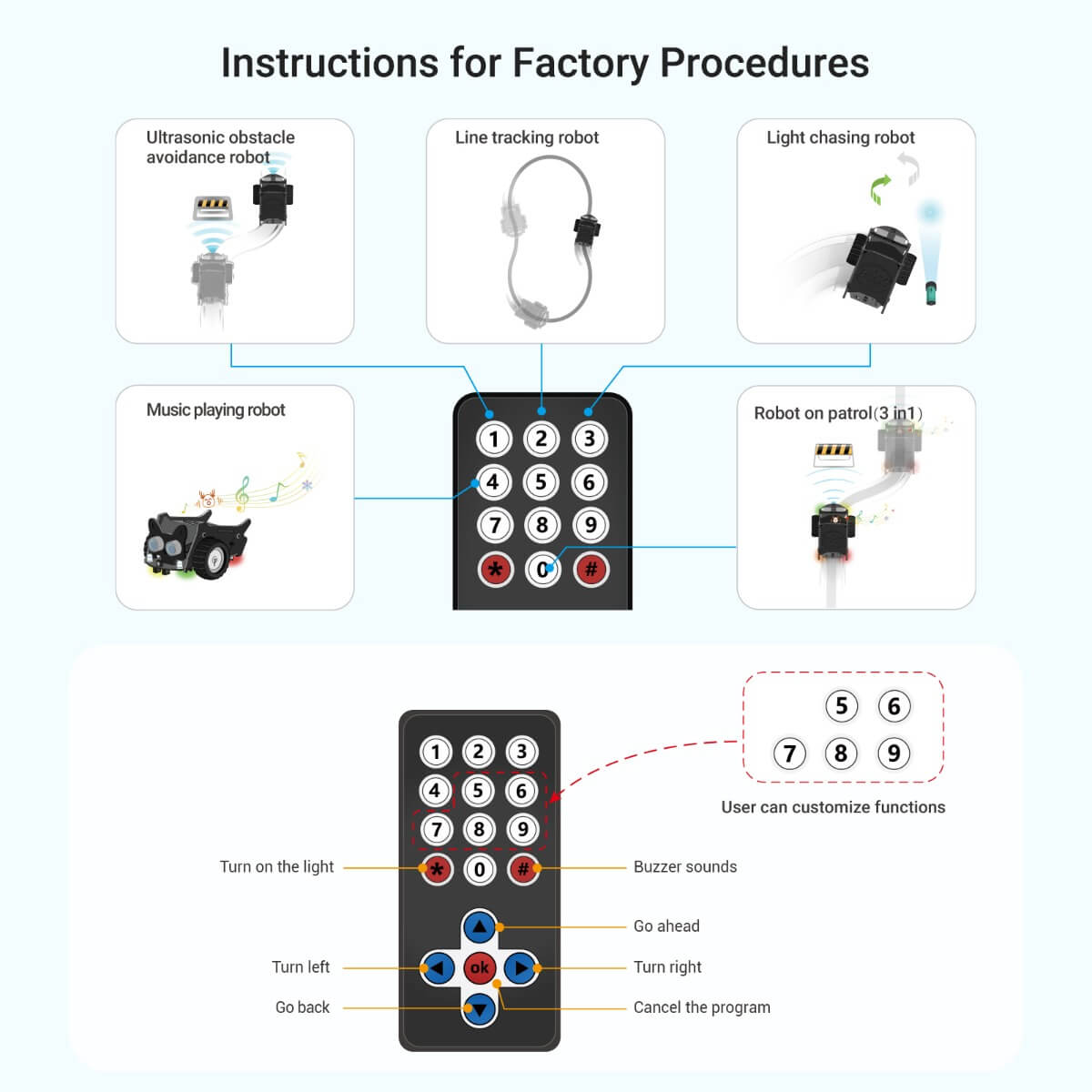
Button 1 (Ultrasonic Obstacle Avoidance Robot) When the distance between the BOLT and the obstacle in front is less than 30cm, the car will turn right; otherwise, it will always keep moving forward. And at the same time, the sensor has built-in RGB lights, which can emit colorful light sources. |
Button 2 (Line tracking robot) Press the button 2, the car starts to follow the black line on the map, turn right when it deviates to the left, turn left when it deviates to the right, and back up when it exceeds the black line. |
|
|
|
|
Button 3 (Light chasing robot) When use the flashlight to shine in front of the BOLT car, it can distinguish the moving direction according to the light intensity to realize the effect of the light-chasing robot.
|
Button 4 (Music playing robot) Press the button 4, the 4 onboard RGB_LEDs of the BOLT randomly display different colors and present the effect of flowing water lights. Apart from these, it can also play music at the same time. |
- The Type C interface at the bottom is plug-and-play for quick programming and more creativity.

- The I2C interface at the bottom of the CrowBot BOLT supports a variety of expansion methods and can be connected with 150+ types of Crowtail modules to complete more interesting projects.

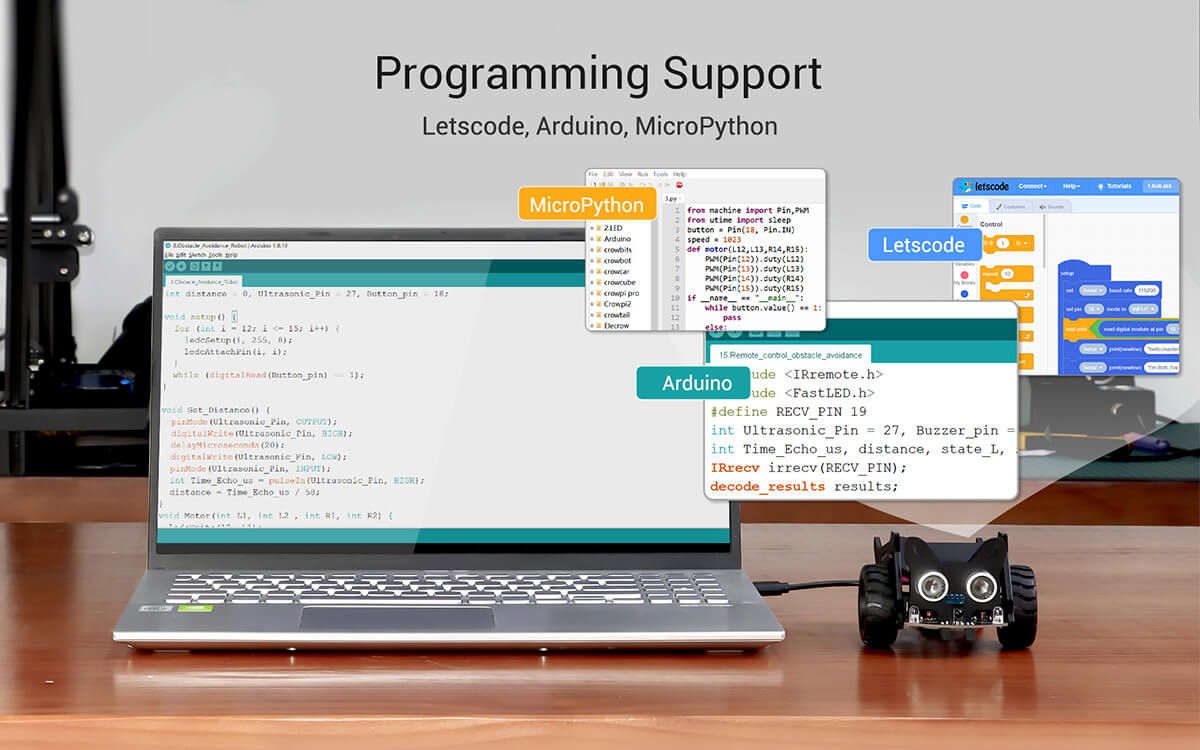
- 16 lessons, 3 programming environments (Letscode, Micropython, Arduino), can learn quickly and complete interesting projects.

Noted: Joystick for CrowBot is optional
- The Joystick is ergonomically designed and feels comfortable to hold, and the transparent acrylic plate can intuitively see the working condition of the handle.

Feature
- 16 lessons in three languages(Letscode, Arduino, Micropython), fast learning and fun experiments
- Compatible with Arduino, MicroPython development environment, using Letscode graphical programming, easy to use
- Strong scalability, with a variety of interfaces, can be expanded and used with Crowtail modules
- A variety of remote control modes, you can use the infrared remote control and joystick to control the car
Specification
|
Processor |
Esp32-Wrover-b(8MB) |
|
Programmatically |
Letscode, Arduino, Micropython |
|
Control method |
Bluetooth-compatible Remote Control/Infrared Remote Control |
|
Input |
Button, Light sensor, Infrared Receiving Module, Ultrasonic Sensor, Line Tracking Sensor |
|
Output |
Buzzer, Programmable RGB Light, Motor |
|
Wifi&Bluetooth-compatible |
Yes |
|
Light sensor |
Can realize the function of chasing light or avoiding light |
|
Ultrasonic Sensor |
When an obstacle is detected, the driving route of the car can be corrected to avoid the obstacle |
|
Line Tracking Sensor |
Can make the car move along the dark/black lines, intelligently judge and correct the driving path |
|
Buzzer |
Can make the car sound/whistle, bringing a more direct sensory experience |
|
Programmable RGB Light |
Through programming, it can show colorful lights in different scenes |
|
Infrared receiver |
Receive infrared remote control signals to realize remote control |
|
Interface |
Type c x1, I2C port x1, A/D port x1 |
|
Motor type |
GA12-N20 Micro DC Gear Motor |
|
Work Temperature |
-10℃~+55℃ |
|
Power supply |
1.5V dry batteries x4(Battery not included) |
|
Battery life |
1.5 hour |
|
Dimension |
128*92*64mm |
|
Weight |
900g |
Package List
- 1x Chassis
- 1x Ultrasonic Sensor
- 1xBattery Holder
- 2x Wheels
- 4x M3*8mm Screws
- 2x M3*5mm Copper Column
- 2x Side Acrylic Plates
- 1x Front Acrylic Plates
- 1x Screwdriver
- 2x 4 Pin Crowtail Cable
- 1x Type C Cable x1
- 1x Infrared remote control
- 1x Instructions & Line Track Map
Wiki&User manual
- Wiki
- CrowBot-BOLT_Assembly-Instruction
- Joystick-for-CrowBot-BOLT_Assembly-Instruction
- CrowBot_BOLT_Beginner’s_Guide
- Designing Documents of CrowBot
- Designing Documents of Joystick
-
Lesson Code
- 3D Model
- Factory Source Code
- Certificate
-
Beginner’s_Guide(Spanish) Translated_by_MK Electrónica
- CrowBot_Assembly-Instruction(Spanish)Translated_by_MK Electrónica
- Joystick_Assembly-Instruction_(Spanish)Translated_by_MK Electrónica